
Power semiconductors are widely used in various industrial equipment like power supplies for induction heating, power converters in electric transportation, traction substations, uninterruptible power supplies, etc.
Welding equipment is no exception. Power semiconductors like IGBTs and welding diodes are very popular among manufacturers of welding equipment.
History of Welding
The history of joining metals goes back several millennia. The earliest examples of this come from the Bronze and Iron Ages in Europe and the Middle East. The ancient Greek historian Herodotus states in The Histories of the 5th century BC that Glaucus of Chios “was the man who single-handedly invented iron welding”. Welding was used in the construction of the Iron pillar of Delhi, erected in Delhi, India about 310 AD and weighing 5.4 metric tons.
The Middle Ages brought advances in forge welding, in which blacksmiths pounded heated metal repeatedly until bonding occurred. In 1540, Vannoccio Biringuccio published De la pirotechnia, which includes descriptions of the forging operation. Renaissance craftsmen were skilled in the process, and the industry continued to grow during the following centuries.
The production of an arc between two carbon electrodes using a battery is credited to Sir Humphry Davy in 1800. In the mid-19th century, the electric generator was invented and arc lighting became popular. During the late 1800s, gas welding and cutting was developed. Arc welding with the carbon arc and metal arc was developed and resistance welding became a practical joining process.
Auguste De Meritens, working in the Cabot Laboratory in France, used the heat of an arc for joining lead plates for storage batteries in the year 1881. It was his pupil, a Russian, Nikolai N. Benardos, working in the French laboratory, who was granted a patent for welding. He, with a fellow Russian, Stanislaus Olszewski, secured a British patent in 1885 and an American patent in 1887. The patents show an early electrode holder. This was the beginning of carbon arc welding. Benardos’ efforts were restricted to carbon arc welding, although he was able to weld iron as well as lead. Carbon arc welding became popular during the late 1890s and early 1900s.
In 1890, C.L. Coffin of Detroit was awarded the first U.S. patent for an arc welding process using a metal electrode. This was the first record of the metal melted from the electrode carried across the arc to deposit filler metal in the joint to make a weld. About the same time, N.G. Slavianoff, a Russian, presented the same idea of transferring metal across an arc, but to cast metal in a mold.
1900 – 1950
Approximately 1900, Strohmenger introduced a coated metal electrode in Great Britain. There was a thin coating of clay or lime, but it provided a more stable arc. Oscar Kjellberg of Sweden invented a covered or coated electrode during the period of 1907 to 1914. Stick electrodes were produced by dipping short lengths of bare iron wire in thick mixtures of carbonates and silicates and allowing the coating to dry.
Meanwhile, resistance welding processes were developed, including spot welding, seam welding, projection welding and flash butt welding. Elihu Thompson originated resistance welding. His patents were dated 1885-1900. In 1903, a German named Goldschmidt invented thermite welding that was first used to weld railroad rails.
Gas welding and cutting were perfected during this period as well. The production of oxygen and later the liquefying of air, along with the introduction of a blow pipe or torch in 1887, helped the development of both welding and cutting. Before 1900, hydrogen and coal gas were used with oxygen. However, in about 1900 a torch suitable for use with low-pressure acetylene was developed.
World War I brought a tremendous demand for armament production and welding was pressed into service. Many companies sprang up in America and in Europe to manufacture welding machines and electrodes to meet the requirements.

Immediately after the war in 1919, 20 members of the Wartime Welding Committee of the Emergency Fleet Corporation, under the leadership of Comfort Avery Adams, founded the American Welding Society as a nonprofit organization dedicated to the advancement of welding and allied processes.
In 1920, automatic welding was introduced. It utilized bare electrode wire operated on direct current and used arc voltage as the basis of regulating the feed rate. Automatic welding was invented by P.O. Nobel of the General Electric Company. It was used to build up worn motor shafts and worn crane wheels. It was also used by the automobile industry to produce rear axle housings.
During the 1920s, various types of welding electrodes were developed. There was considerable controversy during the 1920s about the advantage of heavy-coated rods versus light-coated rods. The heavy-coated electrodes, which were made by extruding, were developed by Langstroth and Wunder of the A.O. Smith Company and were used by that company in 1927. In 1929, Lincoln Electric Company produced extruded electrode rods that were sold to the public. By 1930, covered electrodes were widely used. Welding codes appeared that required higher-quality weld metal, which increased the use of covered electrodes.
During the 1920s there was considerable research in shielding the arc and weld area by externally applied gases. The atmosphere of oxygen and nitrogen in contact with the molten weld metal caused brittle and sometimes porous welds. Research was done utilizing gas shielding techniques. Alexander and Langmuir did work in chambers using hydrogen as a welding atmosphere. They utilized two electrodes, starting with carbon electrodes but later changing to tungsten electrodes. The hydrogen was changed to atomic hydrogen in the arc. It was then blown out of the arc forming an intensely hot flame of atomic hydrogen turning to the molecular form and liberating heat. This arc produced half again as much heat as an oxyacetylene flame. This became the atomic hydrogen welding process. Atomic hydrogen never became popular but was used during the 1930s and 1940s for special applications of welding and later on for welding of tool steels.
H.M. Hobart and P.K. Devers were doing similar work but using atmospheres of argon and helium. In their patents applied for in 1926, arc welding utilizing gas supplied around the arc was a forerunner of the gas tungsten arc welding process. They also showed welding with a concentric nozzle and with the electrode being fed as a wire through the nozzle. This was the forerunner of the gas metal arc welding process. These processes were developed much later.
Stud welding was developed in 1930 at the New York Navy Yard, specifically for attaching wood decking over a metal surface. Stud welding became popular in the shipbuilding and construction industries.
The automatic process that became popular was the submerged arc welding process. This under powder or smothered arc welding process was developed by the National Tube Company for a pipe mill at McKeesport, Pennsylvania. It was designed to make the longitudinal seams in the pipe. The process was patented by Robinoff in 1930 and was later sold to Linde Air Products Company, where it was renamed Unionmelt welding. Submerged arc welding was used during the defense buildup in 1938 in shipyards and ordnance factories. It is one of the most productive welding processes and remains popular today.
Gas tungsten arc welding (GTAW) had its beginnings from an idea by C.L. Coffin to weld in a nonoxidizing gas atmosphere, which he patented in 1890. The concept was further refined in the late 1920s by H.M.Hobart, who used helium for shielding, and P.K. Devers, who used argon. This process was ideal for welding magnesium and also for welding stainless and aluminum. It was perfected in 1941, patented by Meredith, and named Heliarc welding. It was later licensed to Linde Air Products, where the water-cooled torch was developed. The gas tungsten arc welding process has become one of the most important.
The gas metal arc welding (GMAW) process was successfully developed at Battelle Memorial Institute in 1948 under the sponsorship of the Air Reduction Company. This development utilized the gas shielded arc similar to the gas tungsten arc but replaced the tungsten electrode with a continuously fed electrode wire. One of the basic changes that made the process more usable was the small-diameter electrode wires and the constant-voltage power source. This principle had been patented earlier by H.E. Kennedy. The initial introduction of GMAW was for welding nonferrous metals. The high deposition rate led users to try the process on steel. The cost of inert gas was relatively high, and the cost savings were not immediately available.
1950 +
In 1953, Lyubavskii and Novoshilov announced the use of welding with consumable electrodes in an atmosphere of carbon dioxide gas. The CO2 welding process immediately gained favor since it utilized equipment developed for inert gas metal arc welding but could now be used for economically welding steels. The CO2 arc is a hot arc and the larger electrode wires required fairly high currents. The process became widely used with the introduction of smaller-diameter electrode wires and refined power supplies. This development was the short-circuit arc variation that was known as Micro-wire, short-arc and dip transfer welding, all of which appeared late in 1958 and early in 1959. This variation allowed all-position welding on thin materials and soon became the most popular of the gas metal arc welding process variations.
Another variation was the use of inert gas with small amounts of oxygen that provided the spray-type arc transfer. It became popular in the early 1960s. A recent variation is the use of pulsed current. The current is switched from a high to a low value at a rate of once or twice the line frequency.
Soon after the introduction of CO2 welding, a variation utilizing a special electrode wire was developed. This wire, described as an inside-outside electrode, was tubular in cross-section with the fluxing agents on the inside. The process was called Dualshield, which indicated that external shielding gas was utilized as well as the gas produced by the flux in the core of the wire for arc shielding. This process, invented by Bernard, was announced in 1954 but was patented in 1957 when the National Cylinder Gas Company reintroduced it.
In 1959, an inside-outside electrode was produced that did not require external gas shielding. The absence of shielding gas gave the process popularity for noncritical work. This process was named Innershield®.
The electroslag welding process was announced by the Soviets at the Brussels World Fair in Belgium in 1958. It had been used in the Soviet Union since 1951 but was based on work done in the United States by R.K. Hopkins, who was granted patents in 1940. The Hopkins process was never used to a very great degree for joining. The process was perfected, and equipment was developed at the Paton Institute Laboratory in Kyiv, Ukraine, and also at the Welding Research Laboratory in Bratislava, Czechoslovakia. The first production use in the U.S. was at the Electromotive Division of General Motors Corporation in Chicago, where it was called the Electro-molding process. It was announced in December 1959 for the fabrication of welded diesel engine blocks. The process and its variation, using a consumable guide tube, is used for welding thicker materials.

The Arcos Corporation introduced another vertical welding method, called Electrogas, in 1961. It utilized equipment developed for electroslag welding but employed a flux-cored electrode wire and an externally supplied gas shield. It is an open arc process since a slag bath is not involved. A newer development uses self-shielding electrode wires and a variation uses solid wire but with gas shielding. These methods allow the welding of thinner materials than can be welded with the electroslag process.
Gage invented plasma arc welding in 1957. This process uses a constricted arc or an arc through an orifice, which creates an arc plasma that has a higher temperature than the tungsten arc. It is also used for metal spraying, gouging and cutting.
The electron beam welding process, which uses a focused beam of electrons as a heat source in a vacuum chamber, was developed in France. J.A. Stohr of the French Atomic Energy Commission made the first public disclosure of the process on Nov. 23, 1957. In the United States, the automotive and aircraft engine industries are the major users of electron beam welding.
Friction welding, which uses rotational speed and upset pressure to provide friction heat, was developed in the Soviet Union. It is a specialized process and has applications only where a sufficient volume of similar parts is to be welded because of the initial expense for equipment and tooling. This process is called inertia welding.
Laser welding is one of the newest processes. The laser was originally developed at the Bell Telephone Laboratories as a communications device. Because of the tremendous concentration of energy in a small space, it proved to be a powerful heat source. It has been used for cutting metals and nonmetals. Continuous pulse equipment is available. The laser is finding welding applications in automotive metalworking operations.
Types of Welding Processes
There are more than 30 different types of welding, and they range from simple oxy-fuel to high-tech processes such as laser beam welding. However, only four welding types are used commonly, and they are MIG, TIG, Stick and Flux- Cored arc welding. Each of them comes with its own advantages and disadvantages.
- MIG Welding – Gas Metal Arc Welding (GMAW)
- TIG Welding – Gas Tungsten Arc Welding (GTAW)
- Stick Welding – Shielded Metal Arc Welding (SMAW)
- Flux Welding – Cored Arc Welding (FCAW)
- Energy Beam Welding (EBW)
- Atomic Hydrogen Welding (AHW)
- Gas Tungsten-Arc Welding
- Plasma Arc Welding
Types of Welding Equipment
There are quite a few different types of welding machines knocking around. These machines generate heat that melts metal parts so they can be joined. However, there isn’t a single welding machine that is suitable for all welding purposes.
Larger welding equipment tend to be found in industrial sites like factories, while smaller ones are more ideal for domestic or amateur purposes.
- Mig (metal inert gas) welding machines
- Thyristor Control Mig welding machines
- Tig welding machines
- Spot welding machines
- Shielded metal arc welding machines
Mig Welding Machines
It is the best suitable welding machine to be used in the home, workshops, and industry. This welding equipement can weld different types of metals like mild steel, stainless steel, and aluminum. It is used to weld the metal parts with a great speed and it is able to provide a long arc time even when the electrodes are not fully charged.
Thyristor Control Mig Welding Machines
It is used to fix the objects or mount in one suitable surface. This is made of good-quality of hardened materials and it can be a long lasting welding equipment. It produces only a little amount of spark which seems to be easy to control the waves produced from the welding machines. It suits to weld the solid cored and flux materials. You can weld the mild steel, low carbon steel, alloy steel, etc without any risk.
Tig Welding Machines
The specialty of the welding machine is that it can give a clean and pure welding without splatter, sparks and fumes. The metals which are used in the tig welding equipment are stainless steel, brass, gold, magnesium, aluminum, copper and nickel alloys. It is not suitable for site and field work and is the best one to repair the damaged parts.
Spot Welding Machines
This welding machine is used to join the overlap steel sheets. Each sheet is of 3mm thick. The metal sheets can be protected by a pair of electrodes by passing the current through the sheets.
Shielded Metal Arc Welding Machines
Shielded metal arc welding, also known as stick welding, uses an electric current flowing from a gap between metal and welding stick. In this type of welding, electric current is used to create an arc between the base material and the filler rod (also called an electrode rod). The filler rod is covered with a flux that prevents oxidation and contamination by producing carbon dioxide gas during the welding process.
Resistance Welding
Resistance welding is a technique used mainly for joining sheets of metal. It involves the generation of heat by passing a current through the contact resistance between metal surfaces. Small pools of molten metal are formed at the weld area when the high current is passed through. Once the area is cooled down, a solid joint is established. The image below shows major real and parasitic resistances in the secondary loop of the weld transformer. It demonstrates the importance of excellent diode forward characteristics. The welding diode must have a low resistivity in the circuit to be successful in terms of efficiency and lifetime. Any additional losses lead to higher diode stress in the application.

Compared to other welding methods, resistance welding is very efficient, as it causes little pollution and limited work piece deformation. It has high production rates, can easily be automated and requires no filler materials. Therefore, it is used extensively in the automotive industry, as most cars have several thousand spot welds made by industrial robots.
Welding Circuit Principle
The electrical circuit of the resistance welding system consists of 4 parts:
· Frequency converter, which generates a single-phase, quasi-square wave voltage and current of the wished frequency from a 3-phase sine wave. Typically, welding units are assembled together with the IGBT inverter. The output from the inverter is connected to the primary side of the transformer. The wave shape is a PWM rectangular pulse pattern with a typical frequency of 1 kHz and an amplitude of 560 V.
· Transformer with a secondary voltage in the range of 6 – 20 V, with 10 V is the most common. The secondary current is often in the range of 10 – 20 kA but can be even higher for Aluminum welding.
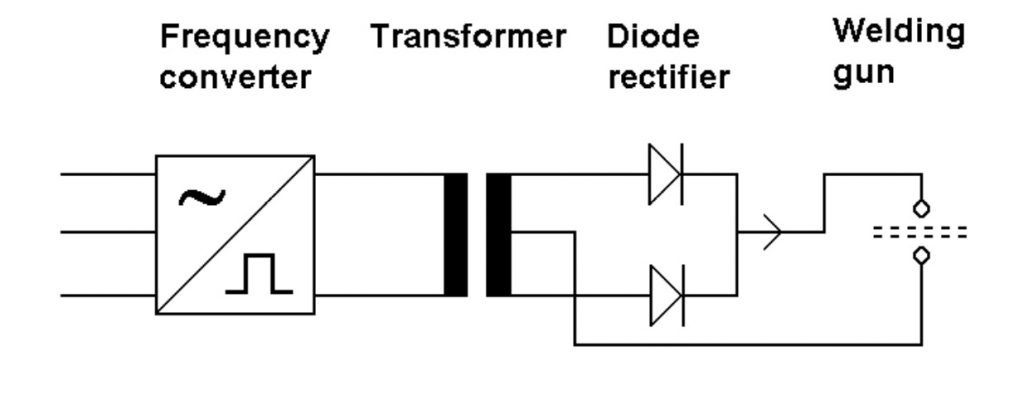
· Diode rectifier to convert the quasi-square wave current to DC-current. This is done since the welding quality is much better when using DC instead of AC. The connection of choice is type M2 to reduce the number of diodes required for the rectification. When higher currents are needed, the capability is increased by having two or more diodes connected in parallel.
· Welding gun with water-cooled electrodes between which the metal sheets to join are pressed.
Robotic Welding
The history of robotic welding equipment is deeply rooted in the history of industrial robots in general, going back to the mid-20th century.
The first programmable robot was invented in 1954 by George Devol, and Devol shortly followed up this invention with the establishment of the world’s first robot company, Unimation. With this new company, Devol and his associates created the first industrial robot. The model, called the Unimate, was used in a General Motors automobile factory in New Jersey, performing spot welding and extracting die castings. After this positive introduction, the concept of the industrial robot spread to all corners of the globe within a decade.
From this initial model, the industrial robot continued to improve. In 1978, Unimation, funded by General Motors, created the Programmable Universal Machine for Assembly, called the PUMA for short. Many labs still use this version today.
The industry continued to grow, booming in the early 80s. During these years, the industrial robot industry grew so rapidly that a new robot or company entered the market every month, increasing competition and innovation substantially. In this decade, robotic arms were improved to have more mobility and control.
Processes continued to improve throughout the 90s, with electronic controls improving to a point where multiple robots could be controlled and coordinated simultaneously. Operator interfaces were also improved, and robot designs were simplified and streamlined to allow more access for maintenance and repair.
Technological advancements continue to improve the functionality of industrial robots to this day, only limited by the costs of equipment and research.
A robot welding unit, also called a robot welding cell, consists of several components working together to weld pieces. These components include those actively taking part in the welding, as well as accessories and safety features to ensure the smooth operation of the cell.
Basic Components of a Robot Welding Cell
- Wire Feeder: This moves filler wire into the robot at a programmed rate. This filler wire is often used to add material to a weld to support the joint.
- Welding Robot: This includes the robot and the tool at the end of the arm, typically a torch or other manipulator. These robots come in two types: articulating robots and rectilinear robots. Rectilinear robots can move their primary arm in three directions and rotate a wrist at the end of the arm. Articulating robots have rotating joints — these allow for more freedom of movement and range of motion outside of three dimensions.
- Wire Cleaner: The cleaner is used to remove spatter from the torch between work cycles, prolonging equipment life span.
- Torch: The torch uses power flowing to an electrode to heat up and join metals together. Arc welding units also have an arc shielding apparatus included in the torch. Also, an air or water cooling unit is usually included.
- Work Area: This is where parts are placed and held for the robot to weld. Fixtures hold the parts in place as the robot completes its welds.

- Controller: This component is effectively the “brain” of the welding cell, supplying power and instructions to the robot using stored programs.
- Teach Pendant: This handheld interface system allows the operator to set welding parameters, manually move the robot and input new programs.
- Welding Power Supply: This supplies power to the welding torch. This will vary in size and performance depending on the requirements of the parts being welded. The power supply differs slightly depending on whether the cell is an arc welding unit or a spot welding unit.
- Stack Light: This light indicates what the cell is doing at any given time. Generally, a red light indicates an emergency stop, an orange light means the robot is being programmed and green means the cell is running automatically.
- Operation Box: This box contains controls to start and stop a cell, and it contains buttons for each function, including a restart button to reset the cell after a malfunction has been resolved.
- Safety Features: Most robotic welding machines will include safety features to prevent harm to workers and operators. These include fencing, arc shielding, access doors and other features to reduce worker exposure to hazardous light, fumes and motion as a cell works.

Power Semiconductors for Welding Equipment
As mentioned in the beginning of this article, the most popular power semiconductors that are used in welding equipment are IGBTs and welding diodes.
There are many companies that offer IGBT in various packaging, but only few of them can provide reliable welding diodes that are perfect fit for robotic welding. Here are the market leaders in this segment:
Manufacturers of Welding Equipment
With growing automotive industry, the demand for welding equipment is just enormous. There are many companies that specialize in this field providing various solutions – from MIG welders to the industrial resistance and arc welding equipment, machines and robots.
- Lincoln Electric
- Miller Electric
- Fronius
- GYS
- ABB
- Panasonic
- ESAB
- Gullco
- Kemppi
- Polysoude
- Obara
- KUKA
- Yaskawa
- Daihen
Future Welding Trends
- Welding operations must be more completely integrated into agile manufacturing processes and process control schemes.
- Welding will become increasingly automated as it is integrated into the entire manufacturing design and coordinated with improved information systems.
- Future products requiring welded joints will be composed of designed-to-be-weldable materials, such as high strength steels that are also smart materials containing embedded computer chips to monitor the weldment’s lifecycle performance. Such materials could create new opportunities for using welding as a joining technique in the coming decades.
- In the future, the modeling of welding will be part of the new emphasis on integrating welding across the entire manufacturing cycle. Welding and materials engineers will develop new materials and adapt existing materials, which are specifically designed to be welded into world-class, fabricated products.
To learn more about power semiconductors and power electronics visit Marketing in Power Electronics section of my website. You can also subscribe to my Power Semiconductors Weekly news podcast series to be up-to-date with the latest news in the world of power semiconductors.


